



The CAN bus in automobiles
What is CAN?
The CAN (Controller Area Network) bus was developed by Bosch in 1983 to reduce the weight of cable harnesses in vehicles. Due to the robustness of CAN technology, CAN has also conquered other industries outside of the automotive industry in which high data security is required. Whether automation technology, elevator systems, medical technology, aircraft technology, aerospace technology, public address technology, rail vehicles or in shipbuilding, the number of applications is steadily increasing.

How does the CAN bus work?
With the use of the CAN bus system, control units or sensors are networked with one another and communication with one another is ensured on a uniform platform. The messages are exchanged between the components in the vehicle at up to 1Mbit per second via two data lines that are twisted together.
What is the CAN bus needed for?
This form of communication makes it possible to control complex processes in the vehicle. The use of the CAN bus has mainly economic reasons:
- The CAN bus enables comprehensive communication in the vehicle to be implemented economically and easily; every sensor can talk to every control unit
- "Upgrades" and system extensions are very easy to solve
- Communication via the CAN bus is extremely secure and less susceptible to crises thanks to internal error management.
- Less cabling effort
- Better error detection, better diagnostic options
- The system continues to run immediately after a short circuit has been rectified
Possibilities and limits of the CAN bus
The bus system enables the opposite side to synchronize and communicate with up to 50 control units. Each of these devices has a uniform interface that is connected to the bus. All data is transferred via a shared line, so communication across devices is also possible. Since the data transmission capacity of the CAN bus is limited, there are 2 data lines. In the CAN bus, priorities are set based on the importance and thus the sequence of the data. So-called “identifiers” ensure that the information is finally processed by the correct devices. Since not every command in the car has the same importance (e.g. engine data are much more important than the air conditioning), different speeds are used for data transmission. Strictly speaking, the CAN bus does not multitask, but rather regulates everything in sequence. With the latest developments in vehicle construction (and with the new requirements of video technology) it is therefore gradually reaching its limits. A more recent development that enables a higher simulated data throughput is the automotive Ethernet bus.
What is the problem with the CAN bus?
Since the CAN bus in automobiles consists of an entire network of control units, this complexity makes it extremely difficult to identify an error. Every control unit tested for itself usually works without errors and conforms to the Spec. The cause of any malfunction is more difficult to localize when signals are falsified (usually difficult to reproduce) or timing problems occur. For this reason, development usually requires additional test tools to identify and isolate the fault more quickly.

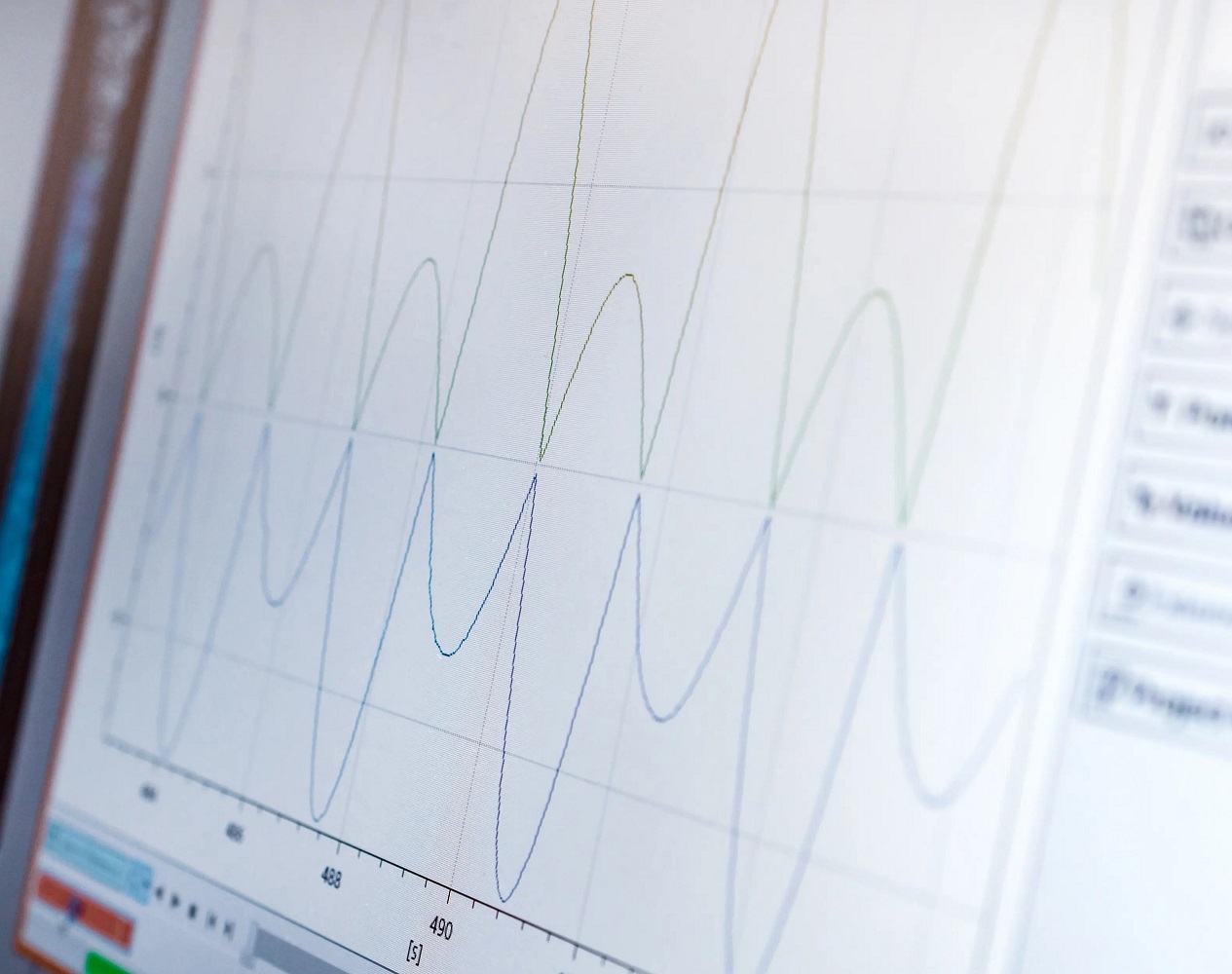
CAN bus tools
The most helpful tools for debugging CAN buses include protocol analyzers, with which the data on the CAN bus can be decrypted and recorded with a time stamp.
The Komodo CAN Duo is a powerful USB-to-CAN adapter and analyzer. It is an "all in one" tool that enables active CAN data transmission as well as distortion-free CAN bus monitoring. The portable interface can be easily integrated into end-user systems and is therefore a flexible and scalable solution for a variety of applications in the automotive, automation, building technology, military and medical electronics sectors. The Komodo Duo can stimulate or monitor up to 2 different buses.